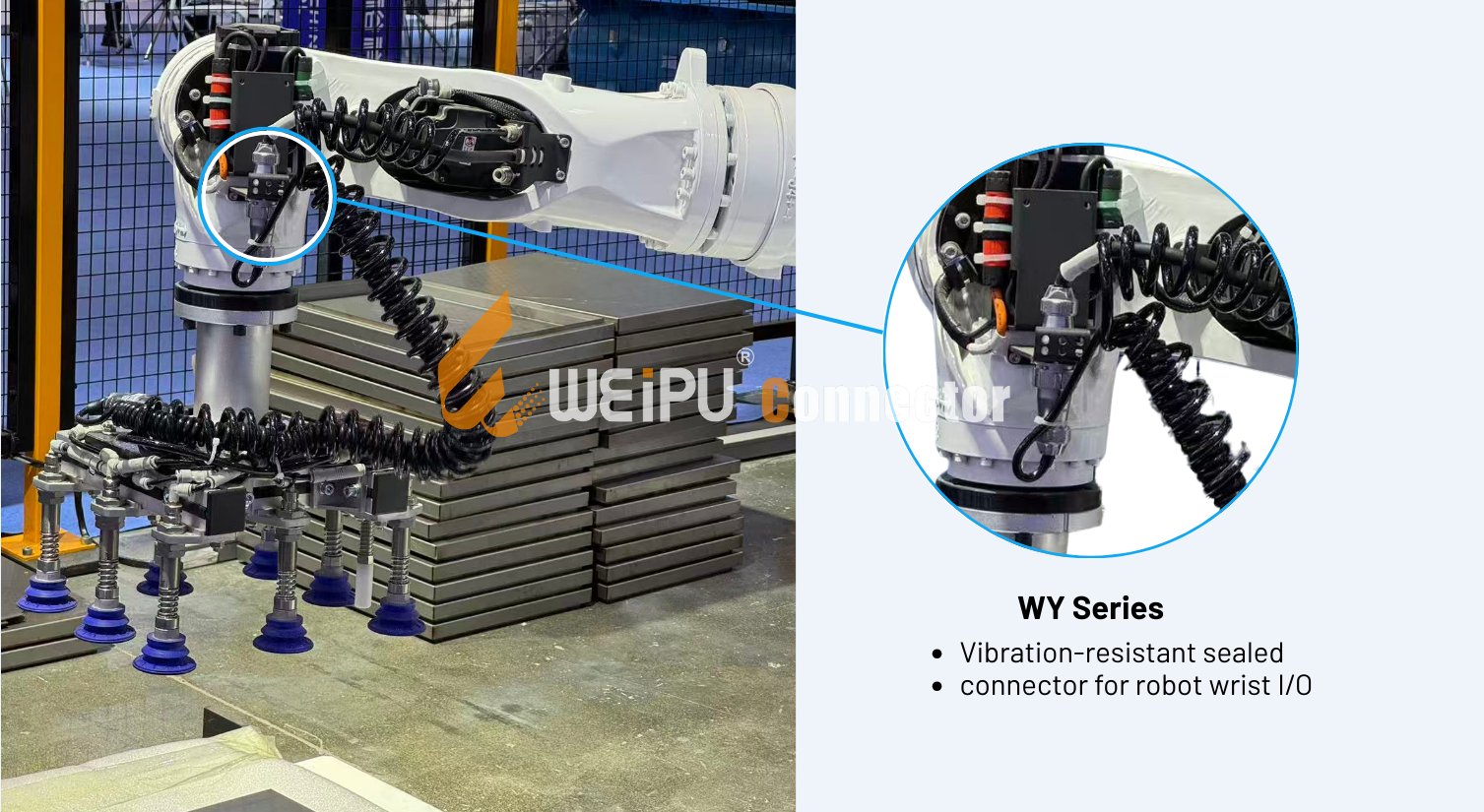
Application 1: WY Series at the Robot Wrist (Stable I/O Under Vibration)
At the wrist, connectors typically carry sensor signals, tool feedback, small power lines, and end-effector control I/O. The connection must survive vibration and repeated movement while remaining easy to service.
WY Series — Key benefits
-
Vibration-resistant connection to reduce intermittent I/O faults
-
IP67 Sealed interface helps protect against dust and splashes
-
Service-friendly design for maintenance around the wrist harness
Use case
Robot wrist I/O (end-effector sensors, grippers, tool signals)
Application 2: SP Series for Sealed Wrist/End-Effector I/O (Harsh Environment Ready)
When the robot wrist is exposed to washdown, coolant splash, dust, or outdoor humidity, sealing becomes critical. In these conditions, SP Series provides an extra layer of environmental protection while still supporting practical maintenance.
SP Series — Key benefits
-
IP68 sealed connection to help prevent ingress at the wrist I/O point
-
Secure mating to maintain contact under motion and vibration
-
Suitable for harsh environments where moisture or dust can affect signal reliability
Use case
End-effector I/O (sensors, grippers, tooling signals) in harsher environments
Application 3: Heavy-Duty / WY at the Robot Base (Power + Control That Stays Locked)
At the robot base (or near the control cabinet interface), connectors often carry servo drive power, control signals, and larger harness lines. The primary risk here is not only environmental exposure but also retention under vibration and strain from heavy cables.
Heavy-Duty / WY — Key benefits
- High retention under vibration to reduce loosening risks
- Stable power + control interface for industrial operation
- Better harness management for thicker cables and high-load routing
Use case
Robot base/control cabinet interface (servo drive power + control, main harness connection)
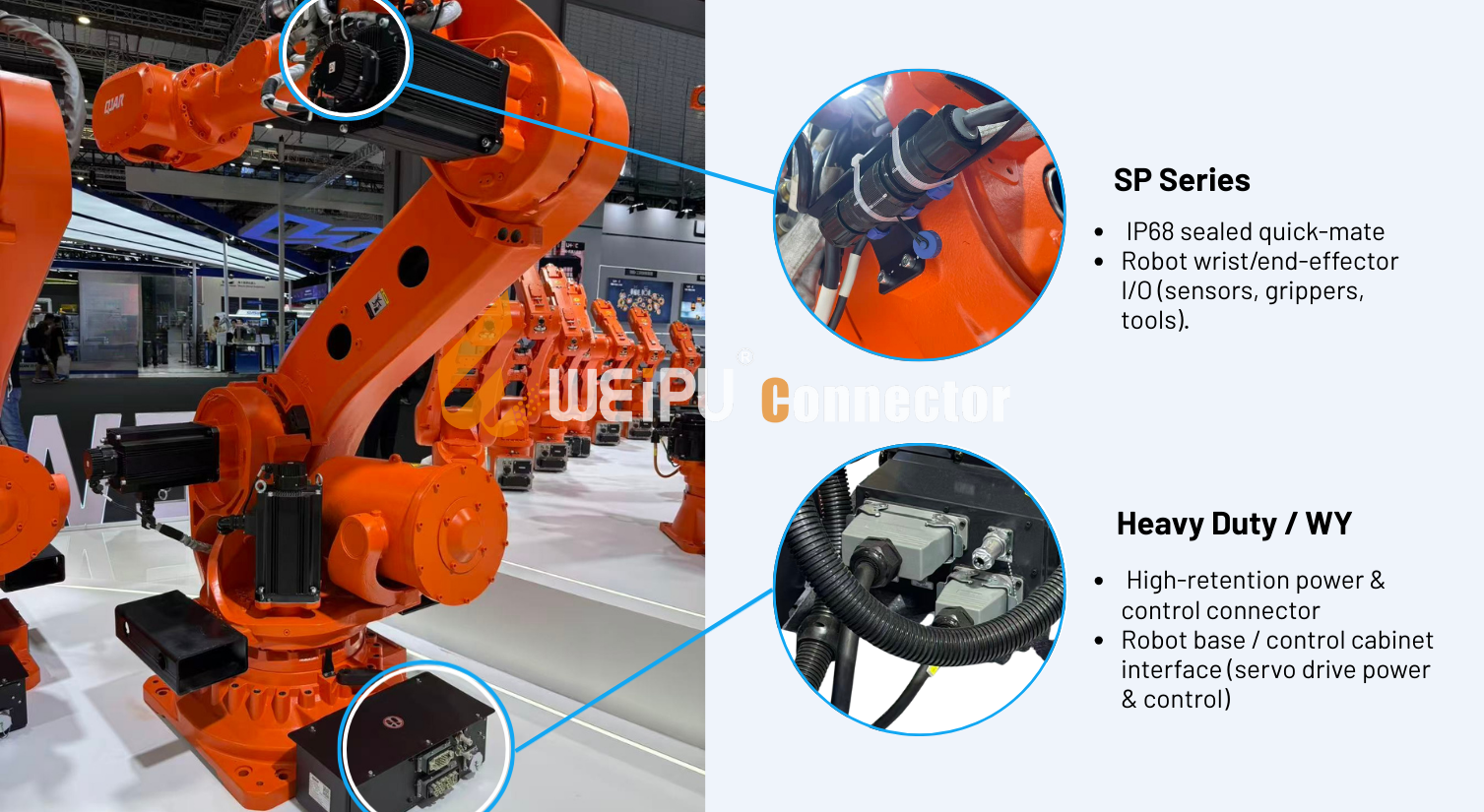
Industrial robot connector zoning using SP sealed wrist I/O connector and Heavy Duty/WY connector for base power and control.




Professional Waterproof Connector
